
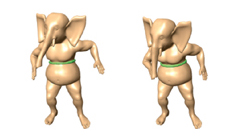
Physically Based
Rigging for Deformable Characters
Steve Capell, Matthew Burkhart,
Brian Curless Tom Duchamp, Zoran Popović
Proceedings of
the 2005 ACM
SIGGRAPH / Eurographics Symposium on Computer Animation
(won the 2005 Best Paper Award Honorable Mention)
abstract
paper (PDF, 4MB)
video: large (DivX, 640x480, 64MB),
small (DivX, 320x240, 30MB)
An extended version of this paper was published in Graphical Models, vol. 69, p. 71-87, 2007. If you would like an electronic copy for non-commercial research and educational use only, please email Steve Capell (see the Grail people page).
Interactive Character Animation Using Dynamic Elastic Simulation
Steve Capell
Ph.D. Dissertation, University of Washington, Department of Computer Science and Engineering, 2004
dissertation (PDF, 24MB)
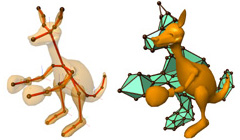
Interactive
Skeleton-Driven Dynamic Deformations
Steve Capell, Seth Green,
Brian Curless Tom Duchamp, Zoran Popović
Proceedings of ACM
SIGGRAPH 2002
abstract
paper (PDF, 1.7MB)
video: Quicktime (68MB),
DivX (33MB)
talk slides (Slithy, 40MB)

A Multiresolution
Framework for Dynamic Deformations
Steve Capell, Seth Green,
Brian Curless Tom Duchamp, Zoran Popović
Proceedings of the 2002
ACM SIGGRAPH Symposium on Computer Animation
abstract
paper (PDF, 0.7MB)
talk slides (PowerPoint, 50MB)










