
|
|
|
|
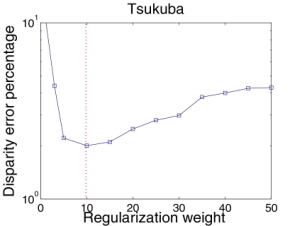
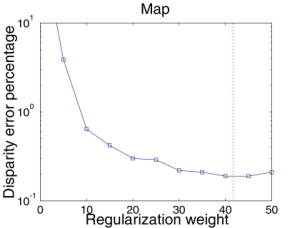
| Some stereo pairs require more regularization than others, as shown in the above graphs that plot error rate of disparity estimation (with respect to ground truth disparity map) as a function of regularization weight. The parameters shown above (red lines) were computed automatically using our algorithm. | |
Abstract
This paper presents a novel approach for estimating parameters for MRF-based stereo algorithms. This approach is based on a new formulation of stereo as a maximum a posterior (MAP) problem, in which both a disparity map and MRF parameters are estimated from the stereo pair itself. We present an iterative algorithm for the MAP estimation that alternates between estimating the parameters while fixing the disparity map and estimating the disparity map while fixing the parameters. The estimated parameters include robust truncation thresholds, for both data and neighborhood terms, as well as a regularization weight. The regularization weight can be either a constant for the whole image, or spatially-varying, depending on local intensity gradients. In the latter case, the weights for intensity gradients are also estimated. Experiments indicate that our approach, as a wrapper for existing stereo algorithms, moves a baseline belief propagation stereo algorithm up six slots in the Middlebury rankings.
Publication
Li Zhang and Steven M. Seitz. Parameter Estimation for MRF Stereo. In Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), San Diego, CA, June, 2005, pp. to appear. [Paper: PDF(1.0M), Poster: PDF(4.5M), bibTex]
Li Zhang and Steven M. Seitz. Estimating Optimal Parameters for MRF Stereo from a Single Image Pair. In IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI), Vol. 29, No. 2, February, 2007. [Paper: PDF(6.2M), bibTex]
See my previous work on Spacetime Faces!
See my previous work on Shape and Motion under Varying Illumination!
See my previous work on Spacetime Stereo!
See my previous work on Single View Modeling!