Manhattan-World Stereo
|
Abstract
Multi-view stereo (MVS)
algorithms now produce reconstructions that rival laser range scanner
accuracy. However, stereo algorithms require textured surfaces, and
therefore work poorly for many architectural scenes (e.g., building
interiors with textureless, painted alls). This paper presents a novel
MVS approach to overcome these limitations for Manhattan World
scenes, i.e., scenes that consists of piece-wise planar surfaces with
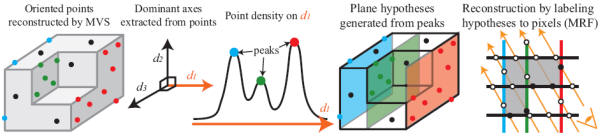
dominant directions. Given a set of calibrated photographs, we first
reconstruct textured regions using an existing MVS algorithm, then
extract dominant plane directions, generate plane hypotheses, and
recover per-view depth maps using Markov random fields. We have tested
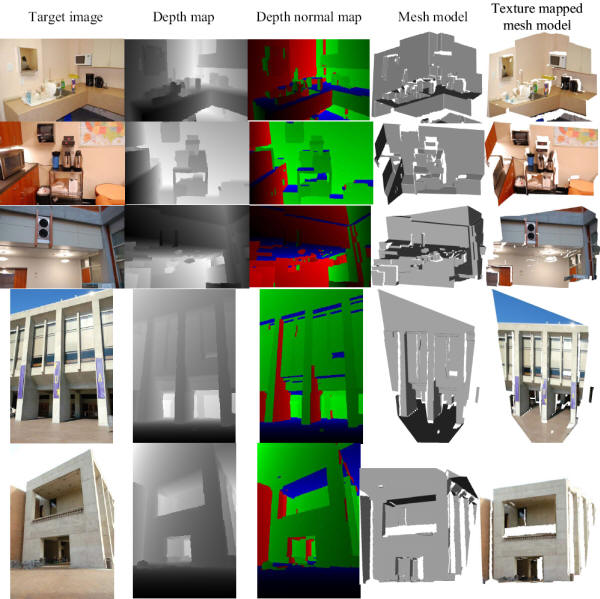
our algorithm on several datasets ranging from office interiors to
outdoor buildings, and demonstrate results that outperform the current
state of the art for such texture-poor scenes.
Paper|
Yasutaka Furukawa, Brian Curless,
Steven M. Seitz, and Richard Szeliski. Manhattan-World Stereo CVPR 2009 |
|
Algorithm overview
Reconstructed depth maps (per-pixel
plane information)
Video (comparison with a
state-of-the-art multi-view stereo algorithm)Acknowledgments
This work was supported in
part by National Science Foundation grant IIS-0811878, the Office of
Naval Research, the University of Washington Animation Research Labs,
and Microsoft.
| Contact: Yasutaka Furukawa |
Last updated on 05/15/2009 |