Animal Locomotion Controllers From Scratch
Abstract
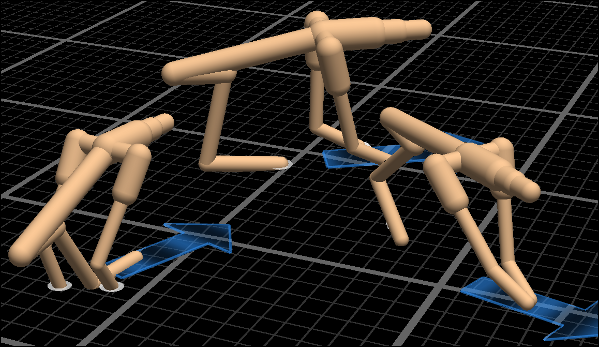
There exists a large body of research devoted to creating real time interactive locomotion controllers which are targeted at some specific class of character, most often humanoid bipeds. Relatively little work, however, has been done on approaches which are applicable to creatures with a wide range of different forms - partially due to the lack of easily obtainable motion-capture data for animals and fictional creatures. We show how a locomotion controller can be created despite this dearth of data by synthesizing it from scratch. Our method only requires as input a description of the shape of the animal, the gaits which it can perform, and a model of the task or tasks for which the controller will be used. From this a sequence of motion clips are automatically synthesized and assembled into a motion graph which defines a physically realistic controller capable of performing the specified tasks. The method attempts to minimize the computational time required to generate this controller and we show its effectiveness at creating interactive controllers for a range of tasks for bipeds, tripeds, and quadrupeds.
Project Members
Resources

|
Animal Locomotion Controllers From ScratchKevin Wampler, Jovan Popović, Zoran Popović ( Eurographics 2013)
[ Paper (600 KB)]
|
| |
|
|
|