Reducing Drift in Structure From Motion
Using Extended Features
David Geraghty |
Jan-Michael Frahm |
Chris Sweeney |
||
University of Washington |
Facebook Reality Labs |
|||
| |
Abstract
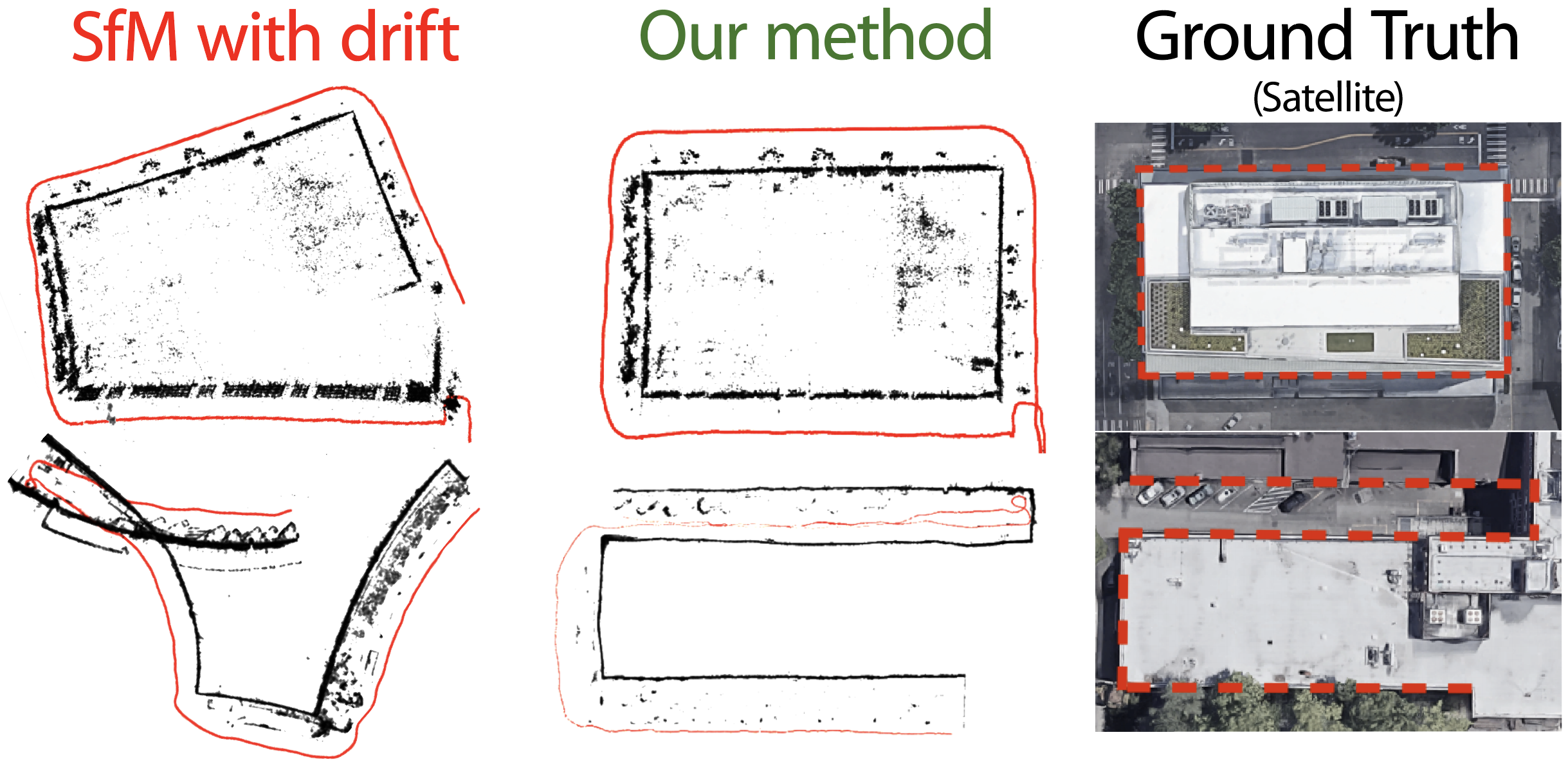
Low-frequency long-range errors (drift) are an endemic problem in 3D structure from motion, and can often hamper reasonable reconstructions of the scene. In this paper, we present a method to dramatically reduce scale and positional drift by using extended structural features such as planes and vanishing points. Unlike traditional feature matches, our extended features are able to span non-overlapping input images, and hence provide long-range constraints on the scale and shape of the reconstruction. We add these features as additional constraints to a state-of-the-art global structure from motion algorithm and demonstrate that the added constraints enable the reconstruction of particularly drift-prone sequences such as long, low field-of-view videos without inertial measurements. Additionally, we provide an analysis of the drift-reducing capabilities of these constraints by evaluating on a synthetic dataset. Our structural features are able to significantly reduce drift for scenes that contain long-spanning man-made structures, such as aligned rows of windows or planar building facades.


BibTeX
@inproceedings{Holynski_ReducingDrift_3DV20,
author={Aleksander Holynski and David Geraghty and Jan-Michael Frahm and Chris Sweeney and Richard Szeliski},
title={Reducing Drift in Structure from Motion Using Extended Features},
booktitle={International Conference on 3D Vision (3DV)},
month={November},
year={2020},
url={https://homes.cs.washington.edu/~holynski/publications/reducing_drift/},
pages={51-60},
}