
|
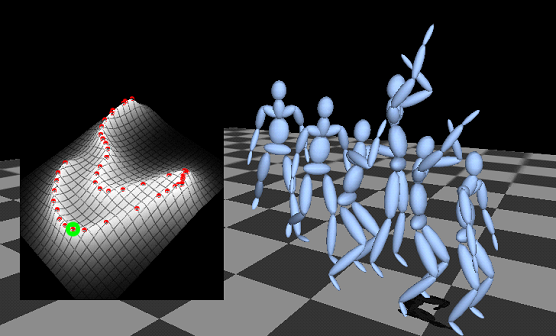
Examples of different styles Baseball Pitch (2MB, Divx AVI) Jump Shot (.7MB, Divx AVI) Track Start (1MB, Divx AVI) |
|

|
Posing characters Posing with track style (9MB, Divx AVI) Posing with track style using style window (6MB, Divx AVI) Simple posing of a hand (4MB, Divx AVI) |
|
|
Simulation of marker loss in real-time mocap Video (14MB, Divx AVI) |
|

|
Smooth intepolation between three walking styles Video (11MB, Divx AVI) |
|
|
Editing keyframed animation Video (9MB, Divx AVI) |
|

|
Posing a character using an image Jumpshot (5MB, Divx AVI) Baseball Pitch (4MB, Divx AVI) |
|
|
Complete Siggraph video High Res Version (720x480) (62MB, Divx AVI) Low Res Version (360x240) (25MB, Divx AVI) |
Errata
The right-hand-side of Equation 15 should be: K-1YW2YTK-1 - DK-1