3D Photography
Goals
3D scanning is the inverse of computer-aided manufacturing --- given a
physical object, such as a clay model of a car, a turbine blade, or a
chair, create a digital representation capturing its shape, color,
reflectance, etc. 3D scanning is similar in principle to other
technologies (like photocopying and video) that quickly, accurately,
and cheaply record useful aspects of physical reality, producing
electronic representations that can be used in ways physical objects
cannot - i.e., viewed on CRTs, edited, stored in databases,
transmitted over networks, analyzed in computer simulations, and used
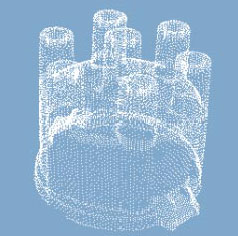
as templates for making physical copies. We have developed algorithms
that construct geometric models from the data produced by current 3D
scanners. For example, the left image below shows a set of datapoints
captured from a multiple viewpoint laser scan of a distributor cap.
The image on the right shows the surface reconstructed by our
software. For more information on our surface representation, see
our page on subdivision surfaces.

The next step is to record a color (rgb) value for each data point
during the scanning process, and use those to create colored surface
models. However, "color" is a much more complex property. Real
objects are not lambertian reflectors --- they look different
depending on the direction from which they are viewed. Shiny surfaces
show specular highlights, and some materials, like velvet, are
inherently anisotropic. To achive more realistic appearance it is
necessary to model and render the luminance (or radiance). Luminance
is a 4D function assigning an rgb value to each surface point and
viewing direction. By representing luminance as a function over the
surface of an object, we obtain a
"surface light field."
The overall goal of this research is modeling surface light fields and
rendering them at interactive rates. The image pair below consists of
renderings from different viewpoints of a reconstructed surface light
field of a porcelain fish with rapid variations in diffuse and
specular reflection:

Personnel
| Current PIs: |
Brian Curless (CSE),
Tom Duchamp
(Mathematics) and Werner Stuetzle
(Statistics).
|
| Current students: |
Daniel Wood
(CSE) and Greg Arden (Mathematics)
|
| Collaborators: |
David Salesin
(CSE) and Steven Seitz
(CSE)
|
| Previous PIs: |
Tony DeRose
and
John McDonald
|
| Previous students: |
Hugues Hoppe,
Kari Pulli,
Wyvern (Ken) Aldinger, and Daniel Azuma
|
Support
This work has been supported by the following grants:
- NSF grant DMS-9803336: 3D Scanning: Acquiring and Modeling
Surface Properties
- NSF grant CCR-9875365: CAREER: Capturing the Real World for
Computer Graphics
- NSF grant DMS-9402734: 3D Scanning: From Physical Objects to Electronic Models
- NSF grant DMS-9103002: Curve and surface reconstruction from unorganized data,
- NSF grant CCR-8957323: Presidential Young Investigator Award,
Publications
-
Approximation Properties of Subdivision Surfaces,
Greg Arden's Ph.D. Dissertation.
-
View-dependent refinement of multiresolution meshes
with subdivision connectivity,
Technical Report UW-CSE-2001-10-02.
-
Surface Light Fields for 3D Photography, SIGGRAPH 2000.
-
Interactive Rendering
of Surface Light Fields, Technical Report UW-CSE-2000-04-01.
-
Acquisition
and Visualization of Colored 3D Objects., The proceedings of The
14th International Conference on Pattern Recognition, Brisbane,
Australia, August, 1998.
-
View-based rendering: visualizing real objects from scanned range and color data,
Proceedings of 8th Eurographics Workshop on Rendering, June 1997.
-
Robust meshes from multiple range maps, Proceedings of
International Conference on Recent Advances in 3-D Digital Imaging and
Modeling, May 1997.
-
Vertex-based Delaunay triangulation of meshes of arbitrary topological
type, Technical Report, July 1997.
-
Interactive
multiresolution surface viewing, SIGGRAPH 96
-
Multiresolution
analysis of arbitrary meshes, SIGGRAPH 95
- Surface Reconstruction from Unorganized Points, Hugues Hoppe,
Ph.D. Thesis, 1994.
- Piecewise Smooth Surface Reconstruction, SIGGRAPH '94.
- Mesh Optimization, SIGGRAPH '93.
- Surface Reconstruction from Unorganized Points, SIGGRAPH '92.
Other materials
- Software
for reconstructing surfaces from range images.
- Software for reconstructing surfaces from unorganized points.
- Range data
collected from various sources.