DynamicFusion: Reconstruction and Tracking of Non-rigid Scenes in Real-Time
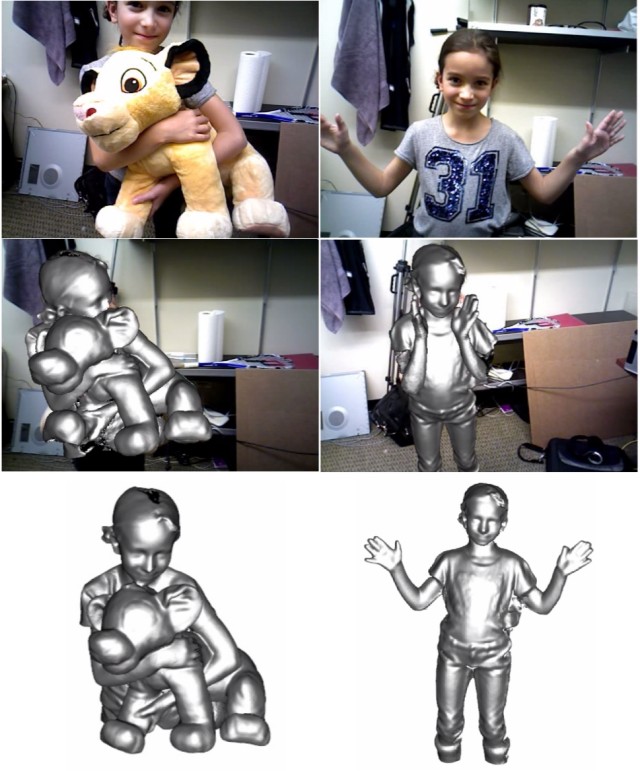
We present the first dense SLAM system capable of reconstructing non-rigidly deforming scenes in real-time, by fusing together RGBD scans captured from commodity sensors. Our DynamicFusion approach reconstructs scene geometry whilst simultaneously estimating a dense volumetric 6D motion field that warps the estimated geometry into a live frame. Like KinectFusion, our system produces increasingly denoised, detailed, and complete reconstructions as more measurements are fused, and displays the updated model in real time. Because we do not require a template or other prior scene model, the approach is applicable to a wide range of moving objects and scenes