Rahul Garg Hao Du Steven M. Seitz Noah Snavely



The top row shows the first five bases learned from images of Orvieto cathedral downloaded from Flickr. The first basis models the mean image, the second and third bases model shading, while the fourth and fifth bases model the specularities. The bottom row shows the reconstruction of Orvieto cathedral facade using 1,2,3,4 and 5 basis images respectively. The image on the far right is the original image.
Abstract:
Low-rank approximation of image
collections (e.g., via PCA) is a popular tool in many areas of computer
vision. Yet, surprisingly little is known justifying the observation
that images of an object or scene tend to be low dimensional, beyond
the special case of Lambertian scenes. This paper considers the
question of how many basis images are needed to span the space of
images of a scene under realworld lighting and viewing conditions,
allowing for general BRDFs. We establish new theoretical upper bounds
on the number of basis images necessary to represent a wide variety of
scenes under very general conditions, and perform empirical studies to
justify the assumptions. We then demonstrate a number of novel
applications of linear model for scene appearance for Internet
photo collections. These applications include, image reconstruction,
occluder-removal, and expanding field of view.
Paper:
The Dimensionality of Scene Appearance
Rahul Garg, Hao Du, Steven M. Seitz and Noah Snavely
In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Kyoto, 2009 (To Appear)
Supplementary material
Technical Report
Applications:
The Dimensionality of Scene Appearance
Rahul Garg, Hao Du, Steven M. Seitz and Noah Snavely
In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Kyoto, 2009 (To Appear)
Supplementary material
Technical Report
Applications:
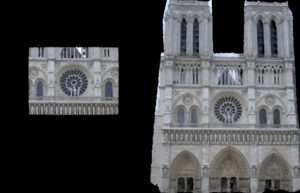 View Expansion |
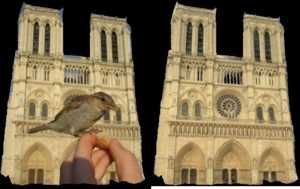 Occluder Removal |